Is het mogelijk om een sleepboot van 22T een elektrische aandrijving te geven? En hoe sterk zou zo’n elektromotor dan moeten zijn? Via de website van ID Technology / Bellman kwam ik op een document bij Mastervolt: http://files.mastervolt.nl/files/content/zeilen_zonder_zeil[1].pdf
Dit is een absoluut startpunt voor elke bootliefhebber die een elektrische boot wil. Het bevat alle theorie en rekenregels die je nodig hebt om te bepalen of het kan en hoe het kan.
Van de Cecilia heb ik de volgende gegevens die ik heb gebruikt voor mijn berekeningen:
| Omschrijving | Waarde | Toelichting |
| Lengte over de waterlijn | 13,45 mtr | Door de geveegde kont is de waarde minder, 12,25 mtr. |
| Gewicht | 22.000 kg | Overgenomen uit meetbrief van 1953 |
| Caterpillar D318 6 cylinder diesel PK | 90 PK/66 kW | Uit oude leaflet van 1953 |
| D318 max toerental | 1.600 rpm | Uit oude leaflet van 1953 |
| D318 moment | 404 Nm | Volgens formule P=Nm*2*Pi*RPs |
| Twindisc keerkoppeling | 3:1 | Betekent max. 533 rpm schroef |
Als een soort van opgave uit het Bellman boek, heb ik een proefvaart gemaakt bij windstil weer (met een schoon schip) en de snelheid bij elk toerental genoteerd mbv twee GPS systemen. De snelheid in de 2e kolom is de gemiddelde snelheid van de beide GPS-en.
| Caterpillar D318 snelheid vs rpm | ||
| RPM | km/h | |
| 500 | 7,05 | |
| 600 | 7,85 | Stationair toerental. Een lager toerental heeft wel eens een afgeslagen motor tot gevolg. Dit betekent dat 6 km/uur als minimale snelheid niet goed gehaald wordt. |
| 700 | 9 | |
| 800 | 9,875 | |
| 900 | 10,78 | Kruissnelheid. Deze snelheid wordt het meest door ons gevaren. Rustig op de motor en toch vlot door het water. |
| 1000 | 11,73 | |
| 1100 | 12,58 | |
| 1200 | 13,58 | Op diep water zoals Adam-Rijnkanaal en Noordzee kanaal varen wij met deze snelheid. |
| 1300 | 14,25 | |
| 1400 | 15,3 | |
| 1450 | 15,3 | Dit is het uiterste toerental dat werd behaald. 1500, laat staan 1600 zit er dus niet in. |
| 1600 | ||
Snelheid van de boot bij toerental
In een grafiek levert dit het volgende op:
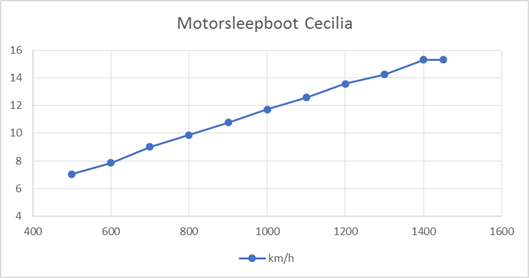
Het levert een lineaire lijn op maar de afvlakking vanaf 1400 rpm is zichtbaar. Daar benader je de maximale rompsnelheid.
Volgens de formules is de maximale snelheid van deze boot het volgende:
| Bij lengte waterlijn 13,45 | 16,50 |
| Bij lengte waterlijn 13,25 | 15,90 |
Hieruit kun je opmaken dat de 90 pk motor uitstekend gedimensioneerd was. Als deze nu nog 1600 rpm zou halen zou de rompsnelheid van 15,90/16,50 gehaald worden. De motor is echter oud en redelijk versleten (of gewoon toe aan een revisie) en kan dus zijn maximale vermogen niet meer leveren. Maar je kunt ook concluderen dat het laatste beetje extra gas in snelheid nauwelijks iets extra’s zal opbrengen en dat wij nooit op deze snelheid varen vanwege trillingen, herrie, brandstofverbruik e.d.
Propellerwet
In het Bellman boek wordt verwezen naar de zogenaamde Propellerwet P=C*N3 (tot de derde).
- P Het vermogen in pk
- C Een constante afhankelijk van het schip en schroef
- N Het toerental van de schroef /100
Stel nu dat P=90 en N=1600/3/100 (deel door 3 ivm de keerkoppeling). Dan is C: 0,59641173
In het boek wordt er echter een voorbeeld uitgewerkt waarbij het toerental van de motor als uitgangspunt wordt genomen. Dat is natuurlijk onjuist want door de keerkoppeling wordt de constante C dus met 3 (tot de macht 3) gereduceerd. Voor de uiteindelijke formule om het benodigde vermogen bij een bepaald toerental te berekenen maakt dit niet uit en dat levert de volgende tabel op:
 Hieruit zien we een logaritmisch oplopende vermogens waarde kW:
Hieruit zien we een logaritmisch oplopende vermogens waarde kW:
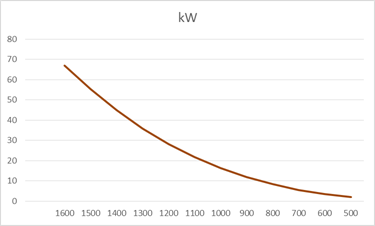
In de tabel zijn de waarden gemarkeerd die wij vaak gebruiken (600, 900, 1200) en hieruit blijkt dat de hoogst gewenste snelheid (bij 1200 RPM) behaald wordt met 28 kW vermogen aan de schroef (circa 38 PK)
Bellman heeft de voorkeur voor gelijkstroommotoren (DC). Maar zij kunnen met Mastervolt producten maximaal een vermogen leveren van 20kW. Voor hogere vermogens wordt de spanning verhoogd. Maar een DC motor draait bij hogere spanning ook een hoger toerental (evenredig) waardoor er een reductie of keerkoppeling nodig is. Bovendien is deze oplossing nogal kostbaar. Ik heb dus gekozen voor een andere optie: een 3 fasen synchrone draaistroommotor. Deze kost met een frequentieregelaar ongeveer de helft van de kosten die Mastervolt voor een motor met besturing voorrekent. Het nadeel van een 3 fasen synchrone draaistroommotor is dat ik de DC accuspanning moet omvormen naar een AC 3 fasen krachtstroom.
Motorkeuze voor een elektrisch vaartuig
Een draaistroommotor heeft een efficiëntie van circa 93%. De rest wordt omgezet in wrijvings- en warmteverlies. Stel we nemen 90% om ook rekening te houden met kabelverliezen e.d. dan hebben we voor onze sleepboot dus een motorvermogen nodig van minstens 28/0,9=31 kW. Vanuit de standaardtabellen voor elektromotoren wordt het dan een 37 kW exemplaar (of 30kW of 45kW). Met 37 kW moet er dus voldoende vermogen voorhanden zijn om 400 rpm te halen (1200/3) en een snelheid van 13,5 km/u te realiseren.
Het volgende dat nu moet gebeuren is het maximaal toerental van de elektromotor bepalen. En dit heeft natuurlijk weer een relatie met het moment Nm.
In onderstaande tabel zie je de toerentallen van standaard industrie elektromotoren, afhankelijk van het aantal polen.
|
Pooltal |
Poolparen |
nsync 50 Hz |
nsync 60 Hz |
| 2 | 1 | 3000 min-1 | 3600 min-1 |
| 4 | 2 | 1500 min-1 | 1800 min-1 |
| 6 | 3 | 1000 min-1 | 1200 min-1 |
| 8 | 4 | 750 min-1 | 900 min-1 |
| 10 | 5 | 600 min-1 | 720 min-1 |
| 12 | 6 | 500 min-1 | 600 min-1 |
Hoe lager het toerental, des te groter en zwaarder de motor en des te hoger het moment, de kracht. En daar zit voor mij ook een fysieke beperking. Een 12 polige motor is alleen in inbouwmaat 315 verkrijgbaar (circa 64 cm doorsnede) terwijl ik maximaal een inbouwmaat 280 (B3, 56 cm) ) kwijt kan. Ik ben dus beperkt tot een 10 polige motor die maximaal 600 toeren per minuut kan draaien en dan 37kW kan leveren. Maar die heeft dan wel een moment 600 Nm. Zie http://www.kolmer.nl/l/library/download/2492 voor diverse specificaties van draaistroommotoren.
Uit de vorige tabellen blijkt dat 37kW vermogen door de Caterpillar ongeveer bij 1300/3 (keerkoppeling) = 433 toeren wordt geleverd. De huidige schroef is volgens een berekening (http://www.vicprop.com/displacement_size.php) 35,9 inch met een pitch van 28,8. Opgemeten is het circa 90 cm doorsnede en dat klopt dus wel met de berekening.
Er zal dus een schroefaanpassing moeten komen om bij hogere toeren (600) toch hetzelfde vermogen (433) te kunnen leveren. Of de frequentie regelaar moet dit kunnen oplossen.
Frequentie regelaar als toerental regelaar
Een frequentie regelaar zorgt er voor dat de motor traploos in toeren geregeld kan worden met behoud van moment Nm. Dus theoretisch kan de 37kW dan ook bij een lager toerental geleverd worden.
Hierdoor is een schroef aanpassing niet nodig. En daarmee voldoe ik aan een uitgangspunt dat ik tijdens het maken van het ontwerp voor mijzelf heb vastgesteld:
aan de vaareigenschappen van de boot mag niets veranderd worden!
Wij manoeuvreren de sleepboot met behulp van de schroefwerking. Het verkleinen van de schroef zou dus ten koste kunnen gaan van de manoeuvreerbaarheid van de boot.
Interessant!
[…] reden om te kiezen voor een industrie draaistroommotor heb ik in een ander artikel toegelicht. Om dit type motor via een frequentie regelaar te kunnen laten draaien, is dus een […]
Beste,
Het is het beste om de elektromotor op een hoog toerental te gebruiken. Op deze toerentallen kan de motor namelijk zijn vermogen leveren.
Bij lagere toerentallen kan er maar minder vermogen geleverd worden ivm overhitting. De stroom mag namelijk niet toenemen boven het maximale.
Ik zou de keerkoppeling met vertraging van 1:3 laten zitten.
Als je dan een 6-polige motor gebruikt en door de freq. regelaar aanstuurt tussen 0-60Hz kun je 0-1200RPM bereiken. Na de tandwielvertraging is dit dus 0-400RPM met 3x zoveel koppel.
Een hoger toerental zorgt voor een flinke gewichtsbesparing van de elektromotor. Je moet er dan verder nog voor zorgen dat de motor iets meer dan 28kW kan leveren op 60Hz.
Beste Mayk,
Je hebt ten dele gelijk. De efficiëntie (of verliezen) van deze 3-fase AC elektromotor tussen 25% of 75% bedragen slechts 3-4% verschil. Dat is dermate klein dat het verlies niet opweegt tegen de verliezen in een reductiekast. Bovendien praat je dan over een verlies van 4% bij circa 10kW, ofwel 400 Watt dissipatie, meestal minder. Van oververhitting is dus geen enkele sprake. De motor is luchtgekoeld en wordt niet eens handwarm.
De voormalige Twindisc koppeling woog 400kg (vanwege het enorme moment van de schroef). Er zou dus geen gewichtsbesparing zijn, tenzij de keerkoppeling door een andere reductiekast zou worden vervangen. En dan zou ook het prijsverschil van een kleinere motor vervallen.
Ah ja inderdaad, dan heb je gelijk!
Ik zag later pas de recentere artikelen haha. Wat ik wel apart vond was dat je nu van 48V DC spanning van de accu via een inverter naar AC krachtstroom gaat die dan op zijn beurt de frequentieregelaar voedt.
Intern doet een frequentieregelaar de krachtstroom gelijkrichten naar DC om die daarna weer te inverteren voor de gekozen frequentie.
Effectief heb je nu dus:
Batterij DC > AC > DC > motor AC
Een andere optie is om ipv een complete frequentie regelaar te gebruiken, alleen een inverter te gebruiken die wordt aan gesloten op de accu rechtstreeks.
Dan moet je alleen wel nog met je generator je accu kunnen opladen.
[…] worden geleverd, totaal 12 kW. Maar dan is dus wel een 48 Volt accu nodig. In het artikel over de motorberekening heb ik aangetoond dat 12 kW gelijk is aan 900 RPM met de oude Caterpillar en dat dit weer […]
[…] Facebook ← Cecilia II – Elektrisch aangedreven, hoeveel vermogen dan? […]